Fast and parallel decoding for transducer. RNN-T 的快速 GPU 解码
Kang, Wei, et al. “Fast and parallel decoding for transducer.” arXiv preprint arXiv:2211.00484 (2022).
icefall :fast_beam_search
公众号 新一代Kaldi 什么是Next-gen Kaldi?
解码算法实现:在K2中用ragged tensor数据结构实现
核心代码实现开源在https://github.com/k2-fsa/k2 (搜索 rnnt_decode.{h,cu}),应用示例开源在https://github.com/k2-fsa/icefall (搜索fast_beam_search)。
解决什么问题
transducer模型每个时间步的输出symbol数量没有约束,不确定一个时间步可以输出几个symbol(可以一直输出symbol直到遇到blank),每个输出都依赖上一个输出symbol,因此难以实现并行解码(本来是串行)。
提出什么方法
设计并实现了在 GPU 上实现高效FSA 解码的方案,为此本文对 RNN-T 做了一些改造。
- 在训练过程中,限制了loss function,使得朝向严格单调对齐的方向输出(音频和文本序列单调对齐)。在RNN-T中使用了无状态的decoder网络,使用有限的left context。
- 解码过程中(greedy search和beam search),限制了每步参与解码的symbol(本来是不确定可以输出几个symbol),更有效地并行批量解码。在解码时限制每一帧语音只能输出一个symbol。
- 提出搜索图可以运行在GPU上的FSA 并行beam search算法。
效果如何
实验表明,在提高解码速度的同时,还能降低WER。
在上述两个前提下,又基于 k2 中的 RaggedTensor 实现了帧同步的 beam search 解码。这可能是现今唯一既能使用 FSA 又能运行于 GPU 的解码方法,通过测试我们发现使用 80M 的模型在英伟达 V100 显卡上能并行跑 200 路以上的语音,LibriSpeech 数据集上的解码实时率低至 0.0025。
还有什么问题
本文贡献
- 通过限制每个时间步发射的符号数量为“1”来加速transducer解码。
- 提出了一种有约束的transucer模型,来提高解码时one-symbol-per-frame的能力。
- 实现了一种基于fsa的并行beam search算法,该算法使得搜索图能够高效地运行在GPU上。
思路
在 GPU 上实现了高效的 FSA 解码,为此我们对 RNN-T 做了一些改造,首先我们在 RNN-T 中使用了无状态的 decoder 网络,使用有限的 left context;另外,我们在解码时限制每一帧语音只能输出一个 symbol。在这两个前提下,我们基于 k2 中的 RaggedTensor 实现了帧同步的 beam search 解码。这可能是现今唯一既能使用 FSA 又能运行于 GPU 的解码方法,我们测试发现使用 80M 的模型在英伟达 V100 显卡上能并行跑 200 路以上的语音,LibriSpeech 数据集上的解码实时率低至 0.0025。该工作提交至 ICASSP2023,icefall中的fast_beam_search实现了该种解码办法。
上述章节中提到我们在GPU上实现了FSA-based的高并发解码方法,这个解码方法的实现得益于我们在RNN-T模型上做的两个小创新。第一,我们的decoder网络是一个无状态的网络,从(https://ieeexplore.ieee.org/document/9054419/)修改而来,我们在embedding层后面加了一个一维卷积以扮演N-gram语言模型的作用。第二,我们在解码阶段严格限制每一帧输出一个符号。这使得我们解码过程不存在自回归,而且在每一帧上也不会有循环存在。具体的实现细节文辞上难以尽述,想了解其中细节可以参看Daniel的proposal:
最终实现跟这个有些差异;k2中的实现
Icefall中的运用:
相关工作
为了加快RNNT解码速度,相关论文中有如下思路:
- 采用caching缓存技术避免了预测网络中相同预测历史的冗余计算。
- 用pruning剪枝减少搜索过程中活跃symbol的数量,使计算更有效率。
- 使用有限的标签上下文label context来合并具有相同预测历史的假设,来减少活跃symbol的数量。
- 在解码过程中限制每个时间步输出的symbol数为1。
Transducer decoding algorithms
Traditional Transducer
$(\mathbf{y}, t)$ 转移到 $(\mathbf{y} + a, t)$ with label $a$ ,转移概率 $P (a|\mathbf{y}, t)$ ;
$(\mathbf{y}, t)$ 转移到 $(\mathbf{y}, t+1)$ ,转移概率 $P (\varnothing|\mathbf{y}, t)$ ;
Stateless Transducer
这种transducer下,decoder network (也就是prediction network,输入是上一时刻的symbol) 可以简化为只有最近的符号,例如y的两个符号。
Max-symbols decoding
限制每帧可以输出的最多symbol,每帧都有一个状态空间,$0 \leq n < S$ ,表示当前状态已经输出了几个symbol了。
所以状态的形式是: $(\mathbf{y}, t, n)$。( $\mathbf{y}$ 是一个序列)
- 当blank $(\varnothing)$ 转移时,形式是 $(\mathbf{y}, t, n)$ → $(\mathbf{y}, t+1, 0) $ ;
- 当label $a$ ($a \neq \varnothing $)转移时(此处 $n \leq S-1$ ),形式是 $(\mathbf{y}, t, n)$ → $(\mathbf{y}+a, t, n+1)$ ;
- 当label $a$ ($a \neq \varnothing $)转移时(此处 $n = S-1$ ),形式是 $(\mathbf{y}, t, S-1)$ → $(\mathbf{y}+a, t+1, 0)$ ;这相当于假设在给定帧上发射 $S$ 个符号后,blank的概率总是1。
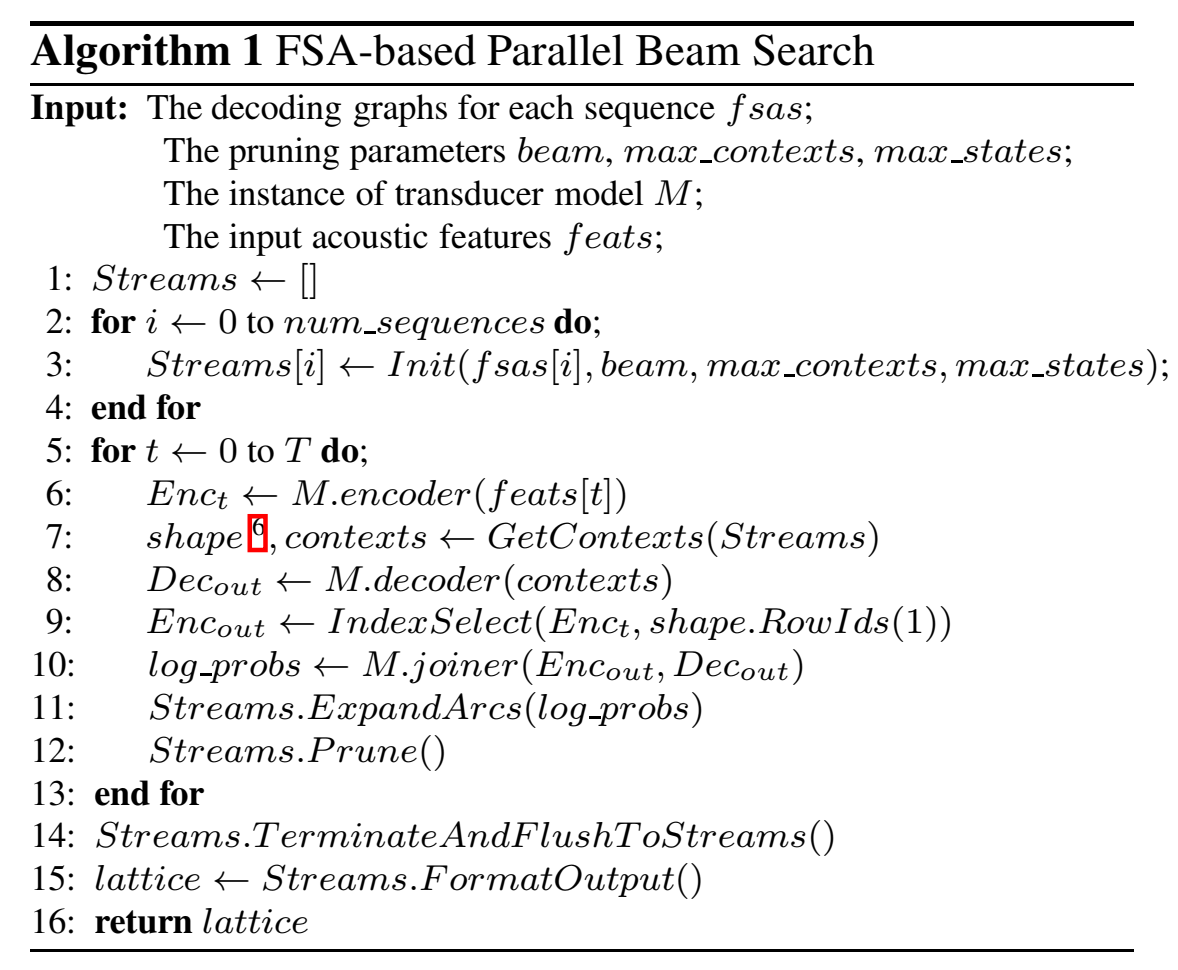
FSA-based decoding
提出两个假设来简化算法:
- 使用stateless transducer ,假设decoder network只依赖非常少的input symbol(前时刻的symbol)。
- 用max-symbols decoding,假设每帧可输出的symbol数量 $S=1$ 。(这和hybrid或CTC解码很像,一帧只会输出一个位置的label)
扩展状态空间,用graph进行解码,state的形式是:$((a, b), t, s) $,$a$ 和 $b$ 是symbols(包括 blank); $t \geq 0$ 是帧索引; $s$ 是解码图状态。
对于label $c$ ( $c \neq \varnothing $ ),概率 $q$,解码图上的每条弧 $s$ → $r$ , lattice上存在这样的转移:$((a, b), t, s)$ → $((b, c), t+1, r)$ ,转移概率 $P (c|(a, b), t) $;
对于label $\varnothing $($\varnothing=0$ ),blank转移 $((a, b), t, s) → ((a, b), t+1, s) $ , 转移概率 $P (\varnothing |(a, b), t) $ ;
解码算法是在k2 中使用 ragged tensor 数据结构实现的,它可以在GPU上并行快速处理不规则大小的对象
Beam search
三个限制:
- a log-probability beam,
- a max-states constraint (that limits the number of tuples ((a, b), t, s) for a given t)
- a max-contexts constraint that limits the number of symbol contexts like (a, b) that are active on a given t
On each frame we first do propagation to the next frame without pruning
We then apply the max-states and beam constraints in one pruning operation; and then apply the max-contexts constraint in a second pruning operation.
Constrained Transducer Training
todo………..
$$
\begin{array}{r}
\alpha(t, u)=\log _{-} \operatorname{add}(\alpha(t-1, u)+\varnothing(t-1, u), \
\alpha(t, u-1)+y(t, u-1)))
\end{array}
$$
with the final data-likelihood being $\alpha(T-1, U)+\varnothing(T-1, U)$, the modified transducer is:
$$
\begin{aligned}
& \alpha(t, u)=\text { log-add }(\alpha(t-1, u)+\varnothing(t-1, u) \text {, } \
& \alpha(t-1, u-1)+y(t-1, u-1))) \
&
\end{aligned}
$$
with the final data-likelihood being $\alpha(T, U)$.