GAN提出论文
==Creswell, Antonia, et al. “Generative adversarial networks: An overview.” IEEE signal processing magazine 35.1 (2018): 53-65.==citation:51486
github:http://www.github.com/goodfeli/adversarial
跟着李沐学AI视频 GAN论文逐段精读【论文精读】
解决什么问题
- 解决了深度学习在生成模型上效果不够好的问题;不够好的原因是最大化似然函数时需要对概率分布进行很多近似,近似带来很多计算;不需要用马尔科夫链中采样,方法更简单;(其实看不太懂到底解决什么问题,相比之前的方法不一样,主要是之前的方法我也不熟);
- 不再去近似 似然函数,而是用其他方法来得到生成模型;
提出什么方法
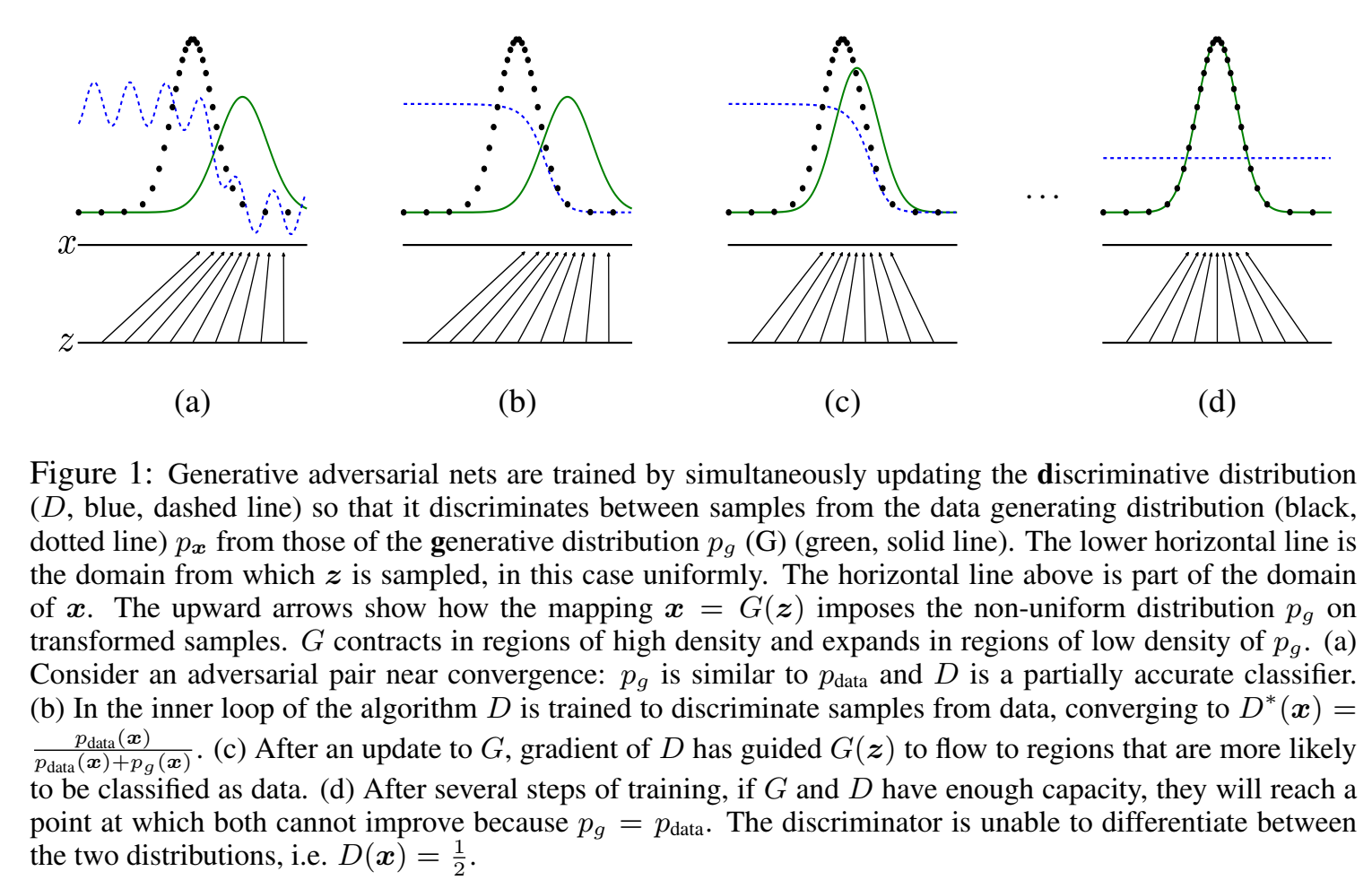
- 提出了一个通过对抗过程来生成模型的新框架,叫GAN;同时训练两个模型,一个叫生成器 $G$,一个叫判别器 $D$;生成器捕捉数据的分布,目标是最大化判别器出错的概率(通过神经网络传递随机噪声,来生成样本);判别器估计样本有多大的概率来自于真实数据(判断该样本是来自模型分布还是数据分布);训练好的生成器是一个能够恢复训练样本分布的模型,训练好的判别器输出等于1/2的(分不出是生成还是真实);
- 判别器的训练逻辑:对于判别器而言,当输入为真实音频x时,应该输出数值1;当输入为合成音频G(z)时,应该输出数值0。生成器的训练逻辑:当生成器的输出G(z)作为判别器的输入时,使得判别器的输出为1;
效果如何
-
存在什么问题
- 难训练,生成器和判别器要均衡好,收敛不稳定;
- loss会有数值问题;
相关工作
在提出该框架之前的做法:之前的方法总是想构造一个分布函数出来,分布函数提供一些参数让它可以学习,这些参数通过最大化似然函数来做(学习一些分布 使得知道是什么分布,学习参数,比如均值、方差);这样的坏处是采样一个分布的时候算起来比较难,特别是当维度比较高的时候;因为这些方 法计算困难,最近有一些工作提出了“generative machines”,不再去构造分布,而是学一个模型来去近似这个结果,好处是算起来容易,坏处是不知道是什么分布;
与该框架很像的一些工作:
- VAE
- predictability minimization
- adversarial examples:构造一些假样本,和真样本很像,来糊弄判别器,从而测试算法稳定性
思路
生成器是一个MLP的情况下,输入是随机噪声(通常是高斯分布),它可以映射到任何一个我们想去拟合的分布;
判别器是一个MLP的情况下,。。
输入多维随机变量 $x$,生成器输出分布 $p_G$,假设输入噪声分布 $p_z(z)$,生成器的传递函数为 $G(z;\theta_g)$ (学习从 $z$ 到 $x$ 的映射);判别器传递函数 $D(x;\theta_d)$ ,输出一个概率数值(一个标量),表示有多大概率输入$x$是来自真实数据(而不是 $p_g$);训练判别器,最大化判别是训练样本还是从生成器采样的样本的正确率,同时训练生成器,生成器的目标是:最小化 $log(1-D(G(z)))$ ($D(G(z))$是生成器采样送入判别器,判别器输出为0(判断成真实样本)的概率,$D(G(z))$越接近0,$log(1-D(G(z)))$ 就越接近0;$D(G(z))$越接近1,$log(1-D(G(z)))$ 就越接近负无穷,因此生成器的目标是最小化 $log(1-D(G(z)))$,也就是尽可能让判别器出错;
two-player minmax game with value function $V(D, G)$:
$$
\min G \max D V(D, G)=\mathbb{E}{\boldsymbol{x} \sim p{\text {data }}(\boldsymbol{x})}[\log D(\boldsymbol{x})]+\mathbb{E}{\boldsymbol{z} \sim p{\boldsymbol{z}}(\boldsymbol{z})}[\log (1-D(G(\boldsymbol{z})))]
$$
最大化D,假设D训练得很好,$D(x)$ 接近1,所以$logD(x)$接近0,$D(G(z))$ 接近0,$log(1-D(G(z)))$ 接近0;而只要D训练得不好,就是负数,因此D的目标是最大化value function;
最小化G,假设G训练得很好,$D(G(z))$ 接近1, $log(1-D(G(z)))$ 接近负无穷(最小了);而只要G训练得不好,就接近0,因此G的目标是最小化value function;
达到均衡:到某个点都无法提高了,对于G来说 $p_g=p_{data}$ 后就无法提高了,对于D来说是 $D(x)=\frac{1}{2}$ 附近(判别器区分不出来了,输入什么输出都是1/2);
目标函数及求解
伪代码:
Algorithm 1 :
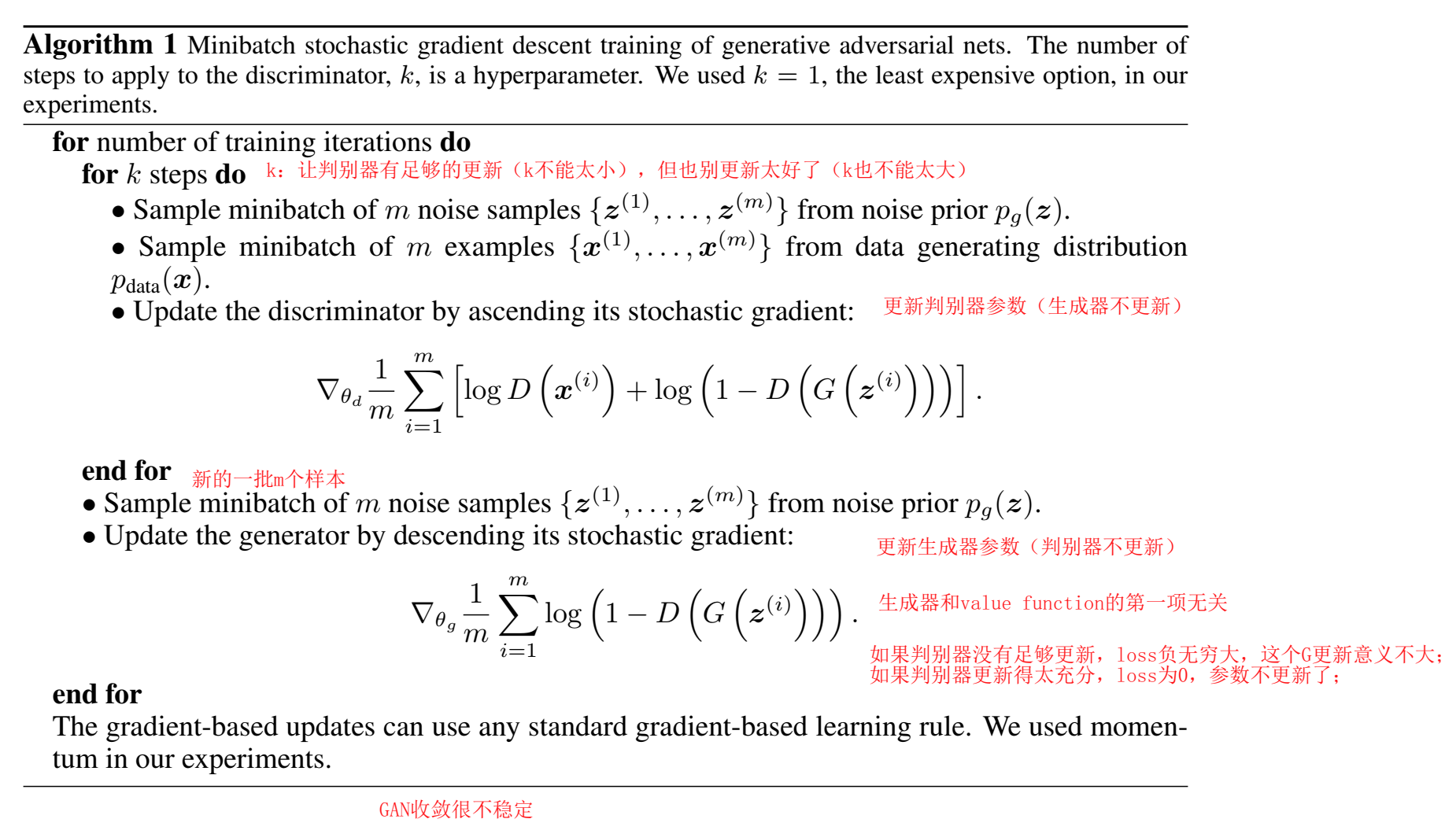
判别器迭代k步,生成器迭代1步;k:让判别器有足够的更新(k不能太小),但也别更新太好了(k也不能太大),因为如果判别器没有足够更新,loss负无穷大,这个G更新意义不大;而如果判别器更新得太充分,loss为0,参数不更新了;
训练早期:一开始D很容易判断正确,因此一开始 $log(1-D(G(z)))$ 等于0,G难更新,因此训练早期更新G别用最小化 $log(1-D(G(z)))$,用最大化 $logD(G(z))$ (但是早期 $logD(G(z))$ 等于负无穷大,也会有数值问题,后续工作会改进);
怎么判断GAN收敛了呢?一个收敛,另一个还没收敛算收敛吗?两个都在抖动算收敛吗?整体来说GAN收敛很不稳定,后续也有很多改进工作;
理论结果
目标有全局最优解,当且仅当生成器学到的分布和真实数据分布相等 $p_g=p_{data}$,
Global Optimality of $pg = p_{data}$
假设判别器D已训练好,任意的生成器G。
Proposition 1. 给定G,最优的D为:
$$
D_G^*(x)=\frac{p_{data}(x)}{p_{data}(x)+p_g(x)}
$$
其中,$p_{data}(x)$ 是真实分布下输出概率值,$p_g(x)$ 是生成器拟合分布下,输入x后输出概率值;
对任意x,最优判别器输出概率为1/2( $p_{data}(x)$ 和 $p_g(x)$ 完全相等时);表示判别器什么都分不开,表示这两个分布是重合的;
(这个思路在工程上很有意义:如何判断两块数据是不是来自同一分布:只要训练一个二分类器,如果能区分开,则不是一个分布,如果区分不开,则是一个分布。举例子来说,我们想知道训练的模型在新环境适不适用,只需要采集新环境的数据,通过训练一个二分类器,看原本的训练数据,与新环境的数据是不是同一个分布(通过看分类器能不能区分)就知道模型适不适用了)
证明Proposition 1
证明公式(2): 对任意生成器G下的 判别器D的训练准则 是 最大化value fucntion $V(G,D)$
期望定义公式: $\mathbb{E}_{\boldsymbol{x} \sim p}f(x)=\int_xp(x)f(x)dx$ ,带入上面的公式(1)后:
如果生成器训练得好,$x=g(z)$,$p_g(x)=p_z(z)$
$$
\begin{equation}
\begin{aligned}
V(G, D)&=\int_{\boldsymbol{x}} p_{\text {data }}(\boldsymbol{x}) \log (D(\boldsymbol{x})) d x+\int_{\boldsymbol{z}} p_{\boldsymbol{z}}(\boldsymbol{z}) \log (1-D(g(\boldsymbol{z}))) d z \
&=\int_{\boldsymbol{x}} p_{\text {data }}(\boldsymbol{x}) \log (D(\boldsymbol{x})) + p_{\boldsymbol{g}}(\boldsymbol{x}) \log (1-D(\boldsymbol{x})) d x
\end{aligned}
\end{equation}
$$
$p_{data}(x)$ 替换为 $a$,$p_g(x)$ 替换为 $b$,$D(x)$ 替换为 $y$,则表达式为 $a\log y+b\log (1-y)$ ,可以画出是一个凸函数(横轴为y),有一个最大值,求最大值,在[0,1]间最大值为 $y = \large \frac{a}{a+b}$(通过求导可知),也就是上面的公式(2);
带入D的最优解到value function中,现在是一个关于G的函数了(D用的最优解),value function要最大化D:
$$
\begin{aligned}
C(G) &=\max D V(G, D) \
&=\mathbb{E}{\boldsymbol{x} \sim p_{\text {data }}}\left[\log D_G^*(\boldsymbol{x})\right]+\mathbb{E}{\boldsymbol{z} \sim p{\boldsymbol{z}}}\left[\log \left(1-D_G^*(G(\boldsymbol{z}))\right)\right] \
&=\mathbb{E}{\boldsymbol{x} \sim p{\text {data }}}\left[\log D_G^*(\boldsymbol{x})\right]+\mathbb{E}{\boldsymbol{x} \sim p_g}\left[\log \left(1-D_G^*(\boldsymbol{x})\right)\right] \
&=\mathbb{E}{\boldsymbol{x} \sim p_{\text {data }}}\left[\log \frac{p_{\text {data }}(\boldsymbol{x})}{p_{\text {data }}(\boldsymbol{x})+p_g(\boldsymbol{x})}\right]+\mathbb{E}{\boldsymbol{x} \sim p_g}\left[\log \frac{p_g(\boldsymbol{x})}{p{\text {data }}(\boldsymbol{x})+p_g(\boldsymbol{x})}\right]
\end{aligned}
$$
现在要最小化G;
理论1 Theorem 1. 全局最小值C(G),当且仅当 $p_g(x)=p_{data}(x)$ ,此时 $C(G)=-\log 4$ ;
证明 Theorem 1
证明 对于 $p_g(x)=p_{data}(x)$,$D_G^*(x)=\frac{1}{2}$,带入C(G)公式得到 $C(G)=\log(\frac{1}{2})+\log(\frac{1}{2})=-\log(4)$,这也是C(G)的最优值;
$$\mathbb{E}{\boldsymbol{x} \sim p{\text {data }}}[-\log2]+\mathbb{E}{\boldsymbol{x} \sim p{\text {g }}}[-\log2]=-\log4$$
KL散度可以衡量两个分布,定义为 $KL(p|q)=\mathbb E_{x\sim p}\log \frac{p(x)}{q(x)}$ ,已知p的情况下,需要多少bit能把q描述出来;对任意x采样自p分布,用该公式可以衡量两分布距离;
$p_{data}(x)+p_g(x)$不是一个分布,因为积分=2,而$\frac{1}{2}(p_{data}(x)+p_g(x))$是一个分布,因为积分=1,把上面公式(4)写为
$C(G)=\mathbb{E}{x\sim p{data}}[\log\frac{p_{data}(x)}{\frac{1}{2}(p_{data}(x)+p_g(x))}]-log(2)+\mathbb{E}{x\sim p{g}}[\log\frac{p_{g}(x)}{\frac{1}{2}(p_{data}(x)+p_g(x))}]-log(2)$
$p_{data}(x)$、$p_{g}(x)$、$p_{data}(x)+p_{g}(x)$ 都是分布,因此可以用KL散度公式,得到:
$$
C(G)=-\log (4)+K L\left(p_{\text {data }} | \frac{p_{\text {data }}+p_g}{2}\right)+K L\left(p_g | \frac{p_{\text {data }}+p_g}{2}\right)
$$
该形式叫Jensen–Shannon divergence ,JS散度,琴森香农散度,与KL散度区别是,JS散度里的p、q分布是对称的,可互换,KL散度不能;
KL散度值大于等于0,等于0的情况是两分布相等,即 $p_{data}= \large \frac{p_{data}(x)+p_{g}(x)}{2}$ 、 $p_{g}=\large \frac{p_{data}(x)+p_{g}(x)}{2}$ ,最优解等价于 $p_{data}=p_g$
Convergence of Algorithm 1
算法1的收敛性证明。
如果G和D有足够的容量,在算法1的每一步,都允许判别器在给定G的情况下达到最优,并更新 $p_g$ ,
$\mathbb{E}{\boldsymbol{x} \sim p{\text {data }}}\left[\log D_G^*(\boldsymbol{x})\right]+\mathbb{E}{\boldsymbol{x} \sim p_g}\left[\log \left(1-D_G^*(\boldsymbol{x})\right)\right]$ ,那么 $p_g$ 会收敛到 $p{data}$ 。
证明:证明过程是泛函分析里的知识点,我看不很懂;凸函数什么的。TODO
实验
todo
后续工作
- conditional GAN,条件GAN。由于该方法没有限制,随便给一个z去生成,因此后续可以给一些限制,去更可控地得到想要的输出,$p(x|c)$ ,给G和D的输入是在一定条件下的;
- Learned approximate inference 通过训练辅助网络对给定x的z进行预测。这类似于wake-sleep algorithm,但优点是在生成器训练完成后,可以对固定的生成器训练?;
- 。。
- Semi-supervised learning 半监督学习。从判别器或者推理网提取的特征可以用来改善模型;
- 提高效率方向。通过设计更好的方法来协调G和D,或者在训练过程中确定样本z更好的分布,可以大大加快训练的速度。